Control
RL-Based Low-Level Motor Control: Beyond PID/ADRC
In the domain of 1kHz real-time motor control that LLMs cannot replace, we introduce WIM's approach to replacing traditional PID/ADRC manual tuning with reinforcement learning (RL).
로봇 제어, 모터 드라이버, 마찰 보상 관련 기술과 실무 경험을 공유합니다.
In the domain of 1kHz real-time motor control that LLMs cannot replace, we introduce WIM's approach to replacing traditional PID/ADRC manual tuning with reinforcement learning (RL).
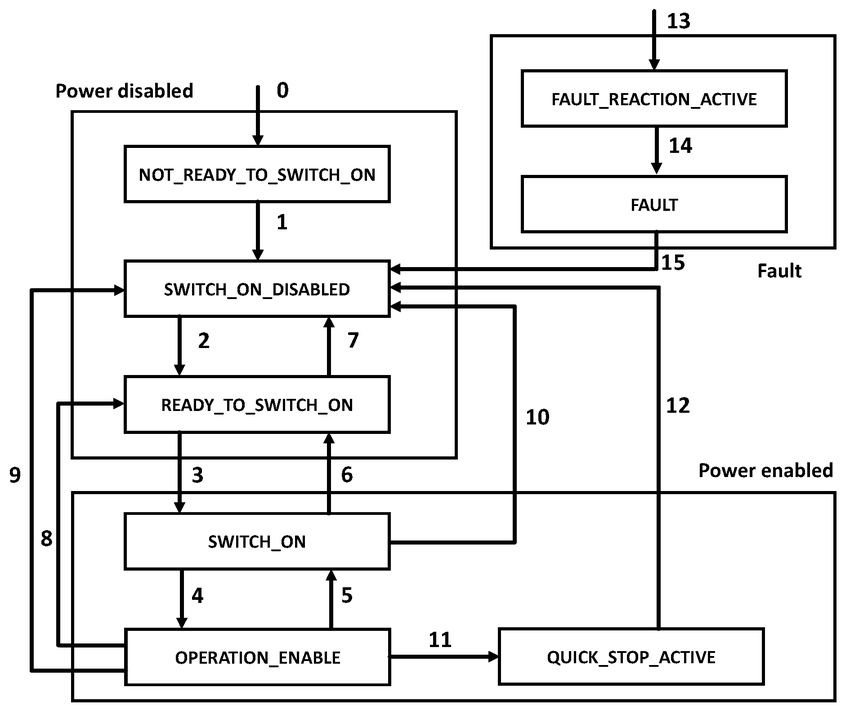
This article explains the CiA402 profile, the motor control standard for industrial robots based on EtherCAT and CANopen. It covers the state machine, Controlword/Statusword bit structures, and operation modes with practical examples.
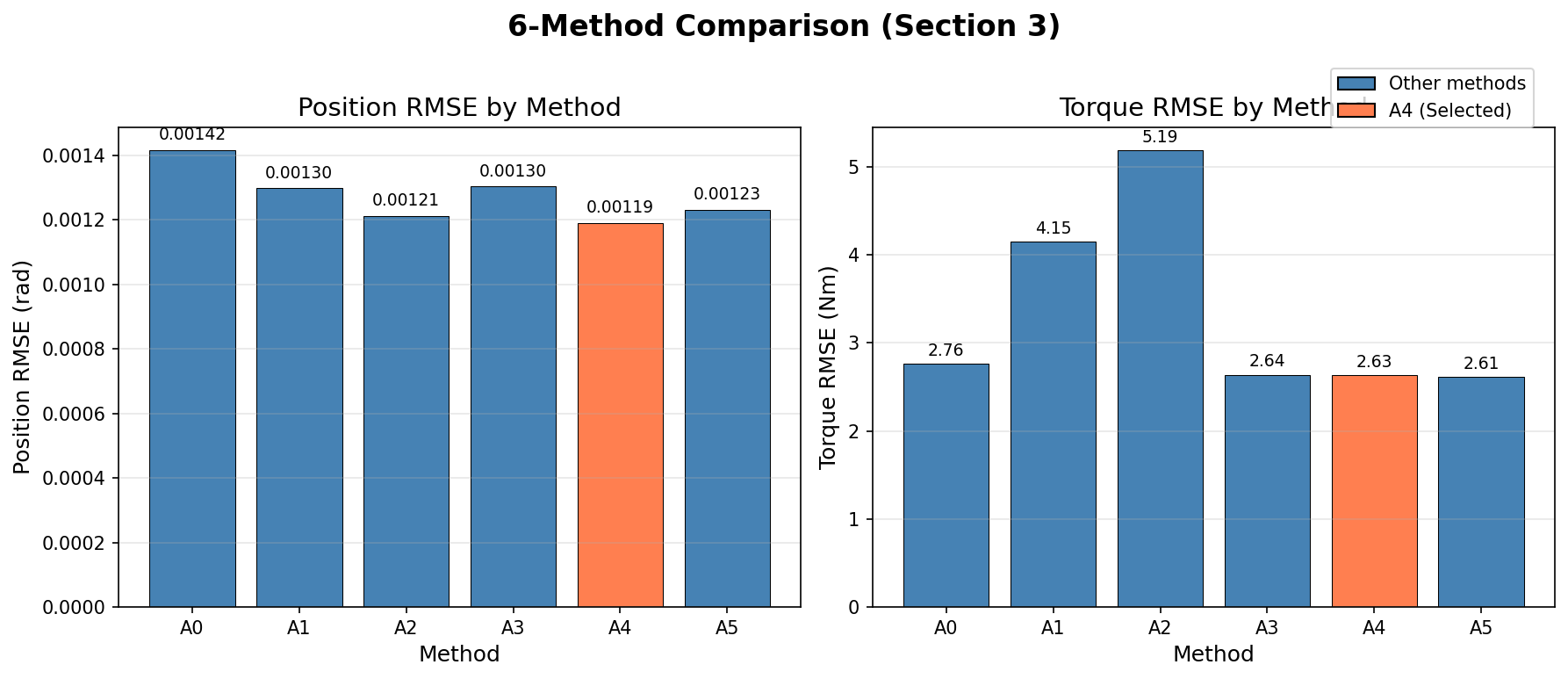
We share the process of optimizing acceleration feedforward control for a 6-axis robot arm. By using planner acceleration + LPF instead of numerical differentiation, we achieved 21.2% improvement in position RMSE and torque stability simultaneously.
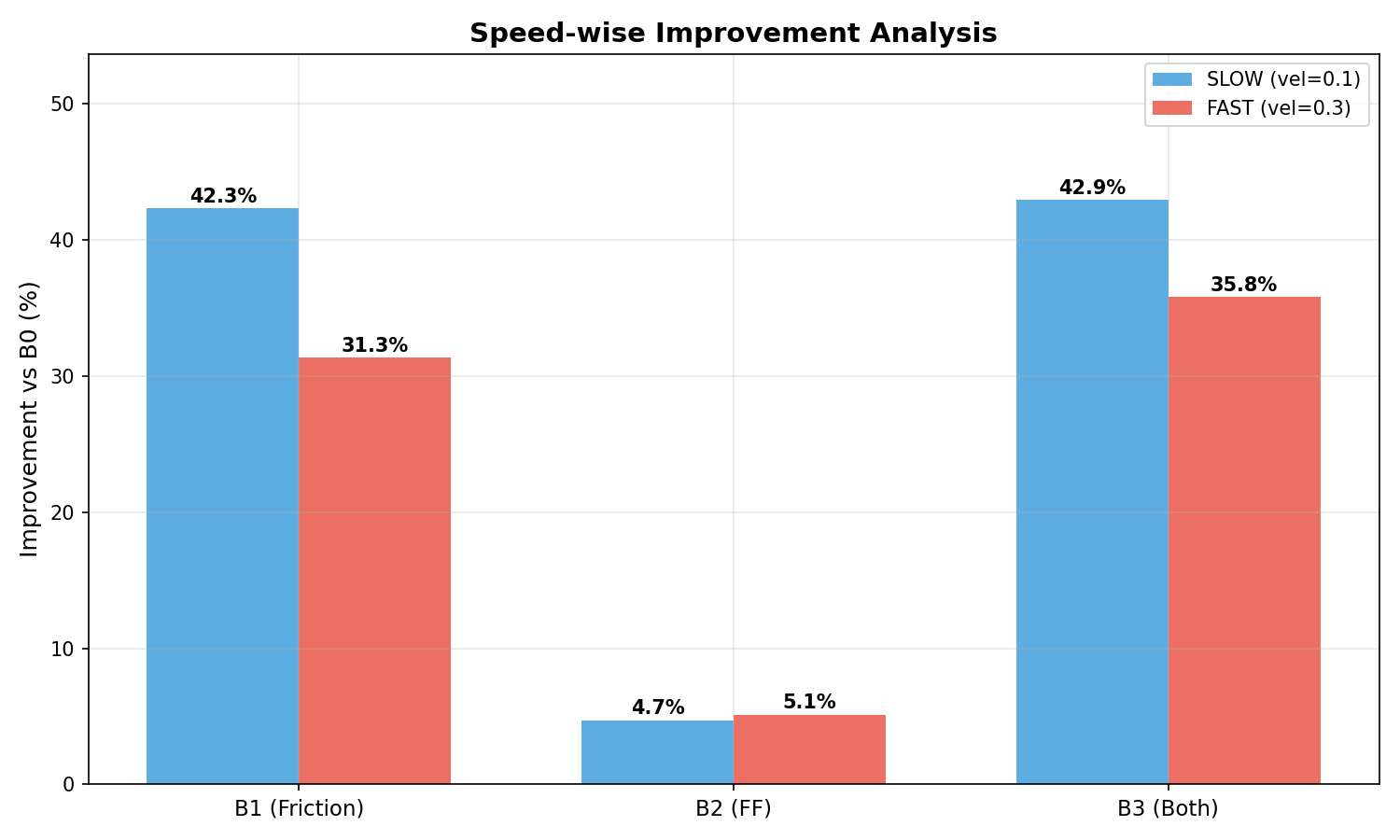
We validate the effects of friction compensation and acceleration feedforward on a 6-axis collaborative robot through 160 runs of 2x2 experiments. Friction coefficients were tuned using an AI agent (ralph-loop), and validation experiments were conducted with automated scripts. Friction compensation alone achieved 36% improvement (Cohen's d=1.49), accounting for 93% of total improvement.