RL-Based Low-Level Motor Control: Beyond PID/ADRC
In the domain of 1kHz real-time motor control that LLMs cannot replace, we introduce WIM's approach to replacing traditional PID/ADRC manual tuning with reinforcement learning (RL).
Sharing the latest technologies, hands-on experience, and in-depth insights in AI and Robotics.
Categories
In the domain of 1kHz real-time motor control that LLMs cannot replace, we introduce WIM's approach to replacing traditional PID/ADRC manual tuning with reinforcement learning (RL).
We measured whether atomic memory ordering could be a performance bottleneck in a 1kHz RT loop on Jetson Orin (Cortex-A78AE). On AArch64, the cost of seq_cst is virtually identical to release/acquire, and the total cost of 25 atomic operations is less than 0.01% of the 1ms budget.
 Vision/Inference
Vision/InferenceAn exploration of how template matching technology in computer vision has evolved from pixel-based methods through SIFT/ORB to SuperPoint/SuperGlue. Covers the principles, limitations, and use-case recommendations for each approach.
 Control
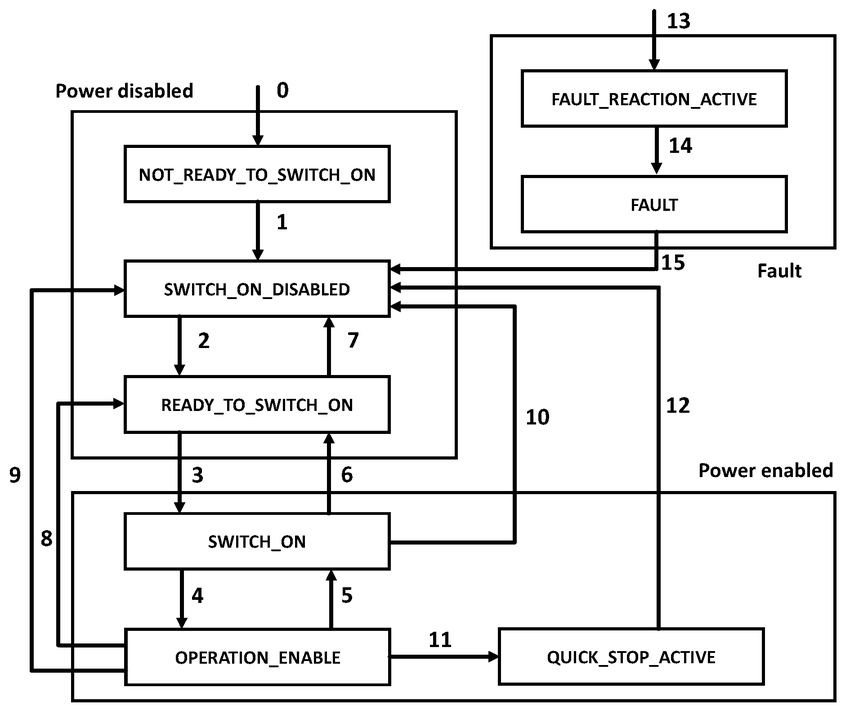
ControlThis article explains the CiA402 profile, the motor control standard for industrial robots based on EtherCAT and CANopen. It covers the state machine, Controlword/Statusword bit structures, and operation modes with practical examples.
The factor determining IPC performance in robot control systems is the synchronization mechanism, not process boundaries. We share a case study achieving 100x improvement from 78-103us with Mutex to 0.74-0.82us with Lock-free.
 Perception/Calibration
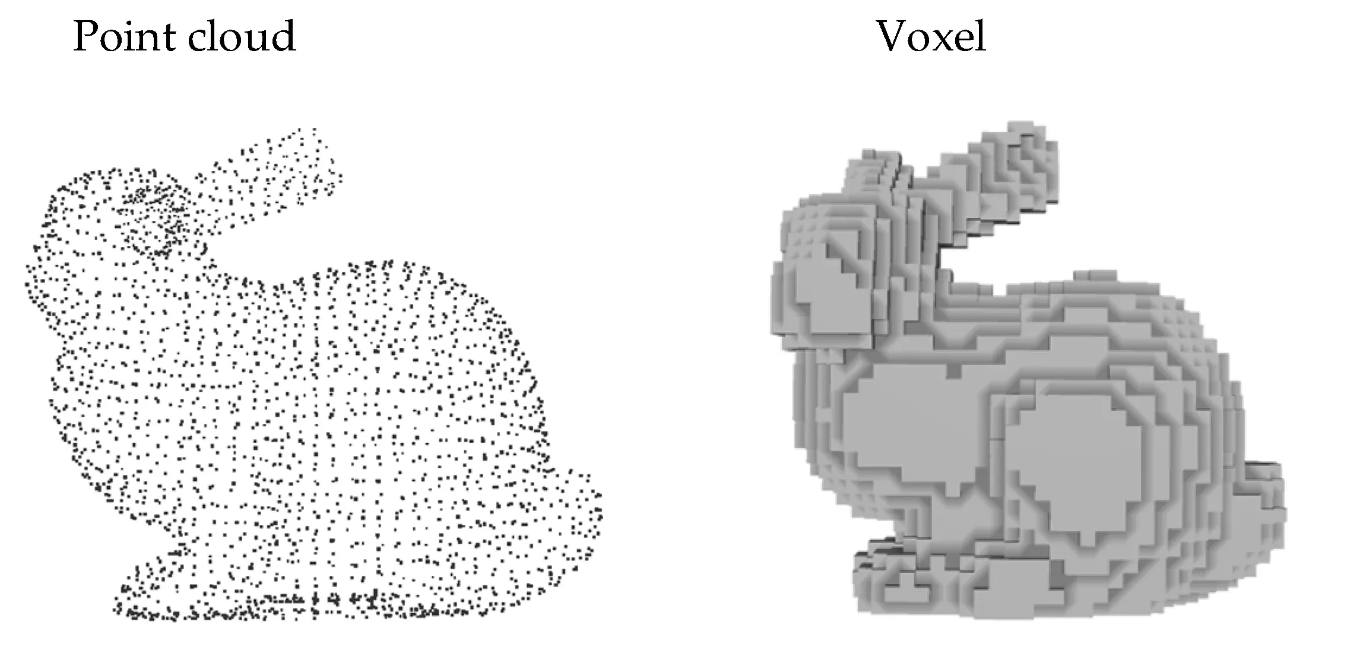
Perception/CalibrationExplains Voxel, SDF, TSDF, and ESDF technologies that robots use to represent and understand 3D environments. Covers differences from Point Clouds and practical applications in robot path planning and surface reconstruction.
WIM Inc. is building the future of industrial automation by integrating AI and Robotics technologies. In this blog, we share the technical challenges we face, our solutions, and the insights we gain.
Through field-tested technologies, in-depth analysis, and practical guides, we aim to help engineers in the AI and Robotics fields.